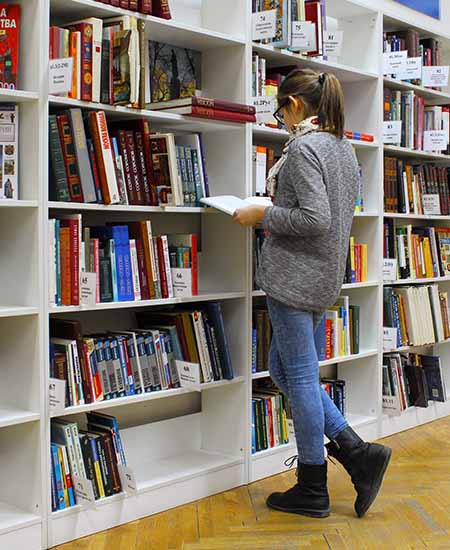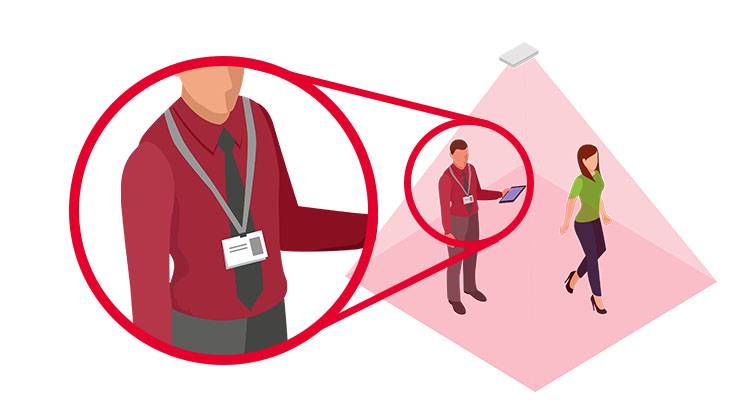
Staff detection
Simple fabric lanyards enable staff members to be distinguished from customers and visitors.
Open areas and wide entrances
Connect multiple sensors together for seamless tracking over large areas, wide entrances or even entire floorspaces.

Dwell and heat maps
Measure how long people spend in different areas and visualize movement trends with heat maps.
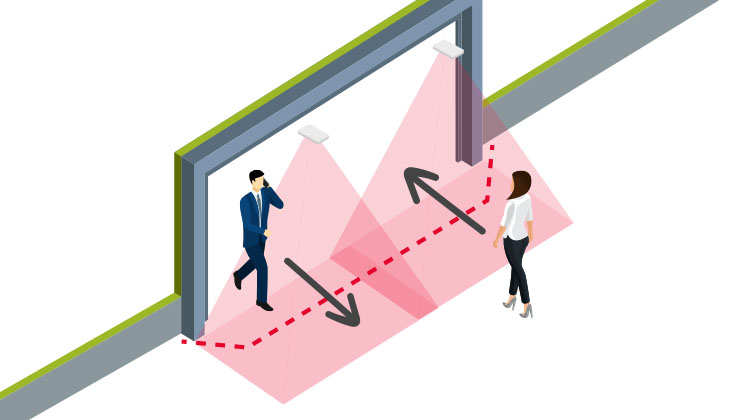
Multi-directional counting
Vector 4D detects the direction of movement and increments counts accordingly.
Group and crowd counting
On-board AI handles large crowds and busy locations with ease.

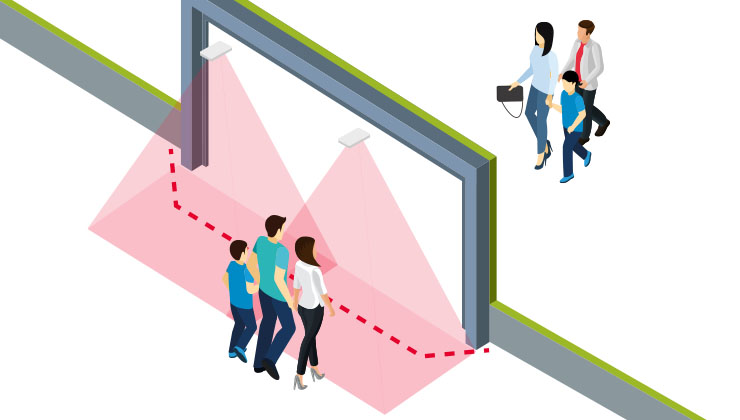
Child filter
Separate adults and children with customizable height filters.